
産業用ロボット
SCARA ロボット改修
老朽化したロボットを対象に、SIEMENS PLC、サーボ制御、PROFINET通信、 運動学実装、Pythonジョイスティック操作を組み合わせた改修を実施しました。
実機を重視したロボティクス、自動化、制御、AI応用の代表案件です。
老朽化したロボットを対象に、SIEMENS PLC、サーボ制御、PROFINET通信、 運動学実装、Pythonジョイスティック操作を組み合わせた改修を実施しました。

YOLO、TensorFlow、画像処理を用いた火災検知と、 ロボットの動作制御を連携させた実用的な監視システムです。

カード挿入、ボタン操作、画面監視、動作記録を自動化するロボットを試作し、 Django GUI と WebSocket 制御を構築しました。
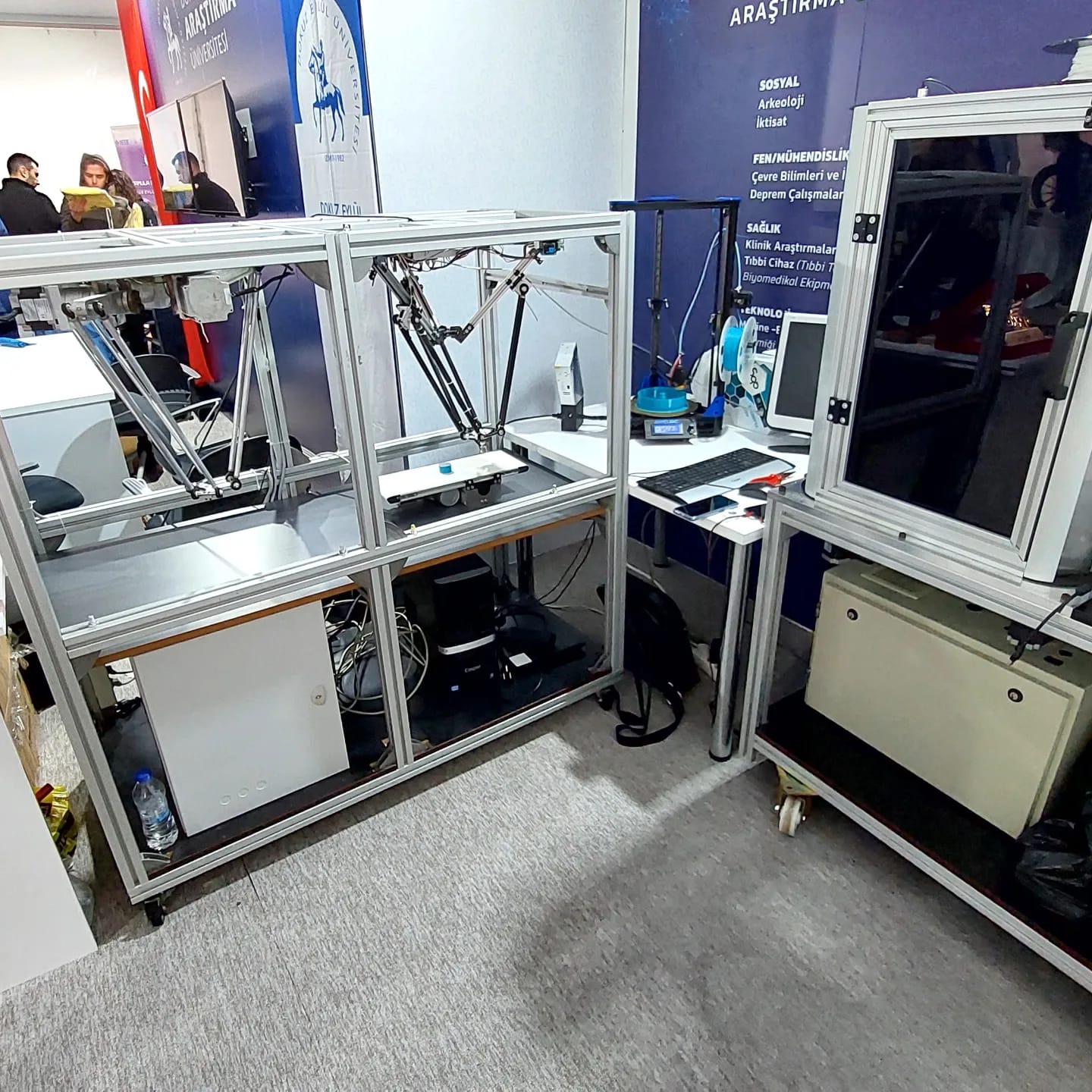
CNC改修、デルタロボット、コンクリートプリンタ、 ヘキサポッド、AGV / ROSなどの幅広い開発経験をまとめて掲載します。
機械工学を基盤に、ロボティクスと産業自動化を中心として活動しています。 機械設計、制御、ソフトウェア、画像処理を組み合わせ、 実際に現場で動くシステムを構築することを得意としています。
ハードウェアとソフトウェアの両方を理解し、 ロボット運動学、PLCモーション制御、装置立ち上げ、 画像処理、実機インターフェース開発まで一貫して対応できます。
運動学、経路計画、サーボ制御、モーション制御、ロボット統合
SIEMENS PLC、PROFINET、CODESYS、装置立ち上げ、制御統合
Python、C/C++、MATLAB、OpenCV、YOLO、TensorFlow、Web UI
SolidWorks、Fusion 360、CNC加工、試作、実装を考慮した設計
CNC、ロボット制御、研究開発、試作機などの幅広い実績です。
制御盤改修、Mach3設定、サーボ調整、統合サポートを担当。
VBマクロとMODBUSでツールチェンジャー・VFD回転数制御を自動化。
運動学、経路計画、画像処理、ADLINK モーション制御連携を実施。
第4軸自動化による接線方向制御の改善を担当。
設計・製作・STM32ベースC++制御ソフトの開発を担当。
CODESYS と EtherCAT を用いた制御開発。
曲げ・巻取り工程を行う専用機の設計と製造プロセス管理。
ナビゲーション、制御、ロボットソフトウェア学習のための試作・研究。
Linux環境構築、ツールチェーン導入、C++ビルド環境整備を担当。
ロボティクス、産業自動化、制御ソフトウェア、 画像処理・AI応用などの分野に関心があります。